Reference
This section describes the API in more detail.
Input Structs
The rotor object is defined as follows.
Missing docstring for Rotor. Check Documenter's build log for details.
The precone angle is shown below (commonly used with wind turbines, less so with propellers).
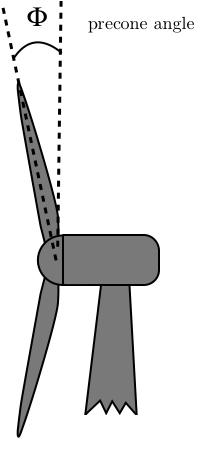
If there is precone then the Rhub and Rtip dimensions correspond to the length along the blade (instead of the radius from the center of rotation). That way when precone is changed, the blade just rotates instead of shearing as is more common. The turbine parameter is used for wind turbines, as discussed in Wind Turbine Operation. The remaining options are for airfoil (and tip loss) corrections and are discussed in Airfoil (and Tip) Corrections.
The Section object is defined as follows:
Missing docstring for Section. Check Documenter's build log for details.
Radius, like the hub and tip radii, follows along the blade. Note that we usually only specify interior r points (e.g., strict inequalities for Rhub < r < Rtip). However, CCBlade will allow you to specify points all the way to r = Rtip and/or r = Rhub, but because the loads are always zero at the hub/tip, the computation is bypassed for efficiency. The thrust/torque integration always extrapolates to zero loads at the tip so there is no benefit to including the ends, however there is no harm either.
Positive twist is shown below.
Airfoils are either a function as noted in the docstring, or a subtype of AFType, which in discussed in more detail in Airfoil Evaluation.
The remaining input is the operating point:
Missing docstring for OperatingPoint. Check Documenter's build log for details.
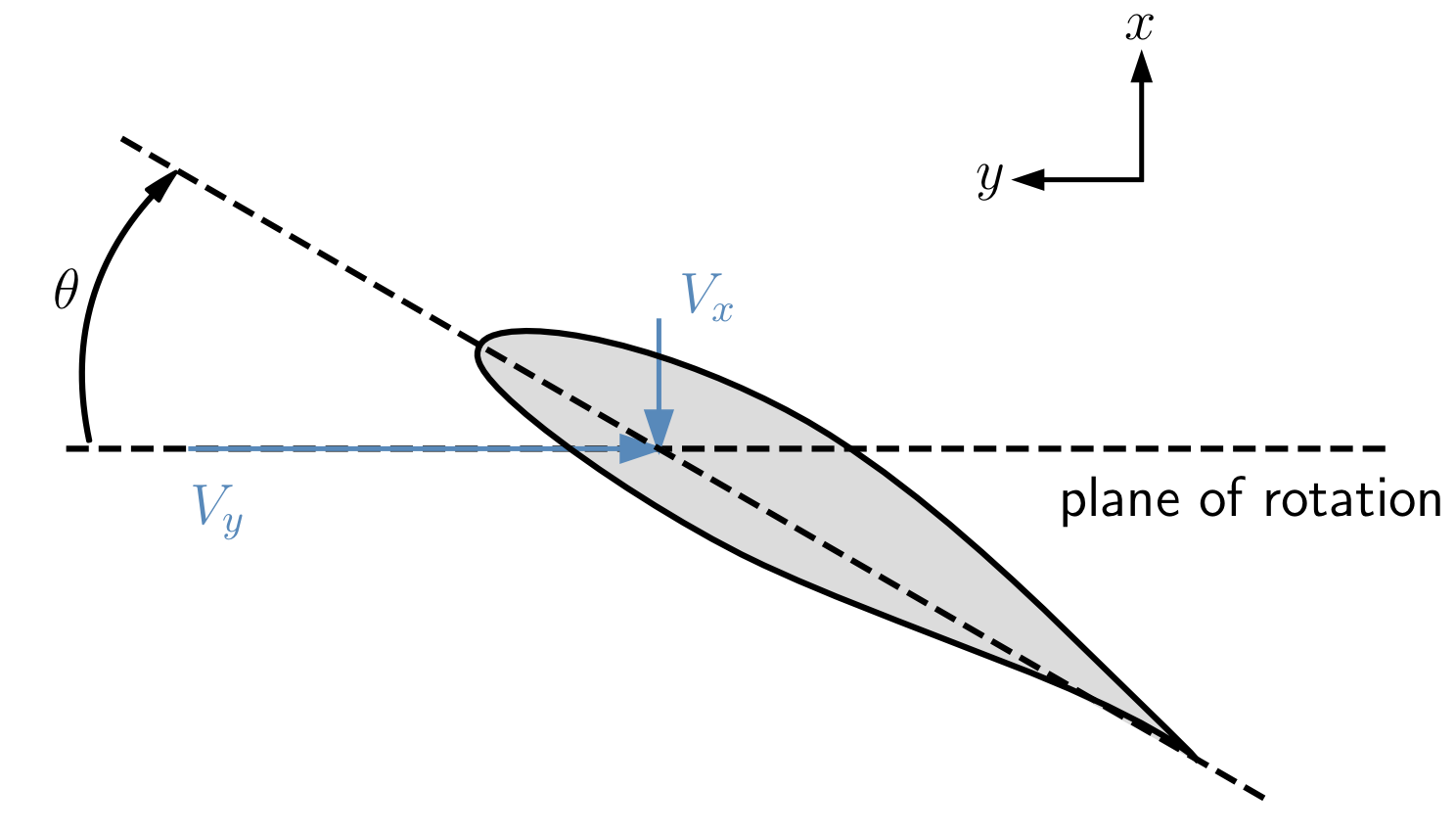
The inflow velocities $V_x$ and $V_y$ are seen in the figure above. This allows to user to specify a completely general input, but usually these aren't specified directly. Rather convenience functions are used to define these velocities across the blade (discussed below). Dynamic viscosity is only need if the airfoil data contains multiple Reynolds number. The speed of sound is only needed if the airfoil data contains multiple Mach numbers. Pitch twists the entire blade in the same positive direction as twist.
A simple propeller would have $V_x = V_\infty$ and $V_y = \Omega r$. That's essentially what the simple_op convenence function provides (with the addition of accounting for precone).
Missing docstring for simple_op. Check Documenter's build log for details.
For wind turbines, a convenience function is provided windturbine_op that also includes yaw, tilt, azimuth, hub height, and a shear exponent.
Missing docstring for windturbine_op. Check Documenter's build log for details.

To account for the velocity change across the hub face we compute the height of each blade location relative to the hub using coordinate transformations (where $\Phi$ is the precone angle):
\[ z_h = r \cos\Phi \cos\psi \cos\Theta + r \sin\Phi\sin\Theta\]
then apply the shear exponent ($\alpha$):
\[ V_{shear} = V_{hub} \left(1 + \frac{z_h}{H_{hub}} \right)^\alpha\]
where $H_{hub}$ is the hub height. Finally, we can compute the x- and y-components of velocity with additional coordinate transformations:
\[\begin{aligned} V_x &= V_{shear} ((\cos \gamma \sin \Theta \cos \psi + \sin \gamma \sin \psi)\sin \Phi + \cos \gamma \cos \Theta \cos \Phi)\\ V_y &= V_{shear} (\cos \gamma \sin \Theta\sin \psi - \sin \gamma \cos \psi) + \Omega r \cos\Phi \end{aligned}\]
Output Struct
The full list of Outputs is as follows:
Missing docstring for Outputs. Check Documenter's build log for details.
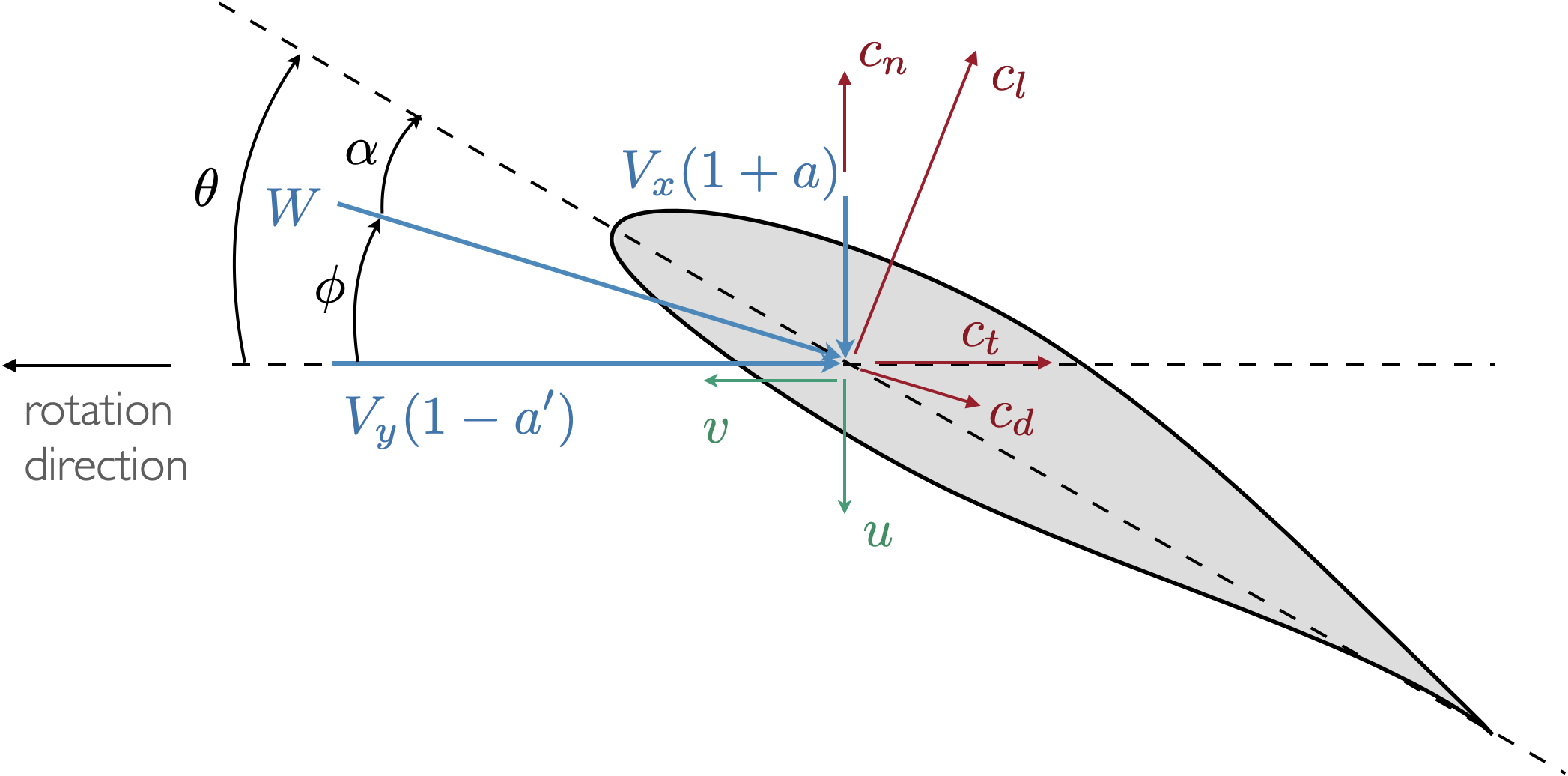
Most of these parameters are defined in the figure below. The variables Np and Tp (where p is short for prime, as in a force per unit length) are in the cn and ct directions respectively.
When using broadcasting to retrieve multiple outputs as once (as would be commonly done for multiple sections along a blade) the return type is an array of structs. However, the dot notation is overloaded so that the outputs can be accessed as if it was a struct of arrays (e.g., outputs.Np). This was shown in the introductory tutorial.
One subtle notes regarding the way the tip-loss factor works. The BEM methodology applies hub/tip losses to the loads rather than to the velocities. This is the most common way to implement a BEM, but it means that the raw velocities may be misleading as they do not contain any hub/tip loss corrections. To fix this we compute the effective hub/tip losses that would produce the same thrust/torque. In other words: $C_T = 4 a (1 + a) F = 4 a G (1 + a G)$ We solve this for G, and multiply it against the returned wake velocities $u$ and $v$ (but not the induction factors). Doing so allows us to return consistent values for the wake velocities, which may be of interest when computing interactions between rotor wakes and other objects.
Solve
Solve is the main function that takes in the three input structs (Rotor, Section, OperatingPoint) and returns the output struct (Outputs). Often broadcasting is used to call this function at multiple sections, or multiple sections and multiple operating points.
Missing docstring for solve. Check Documenter's build log for details.
Integrated Loads
After solving, the distributed loads can be integrated to provide thrust and torque using the function thrusttorque.
Missing docstring for thrusttorque(::Any, ::Any, ::Vector{TO}) where TO. Check Documenter's build log for details.
The method extends to loads to the hub/tip (where the loads go to zero) to capture the small contribution to thrust and torque from the ends of the r vector to Rhub and Rtip.
There is also an overloaded version where a matrix of outputs is input for azimuthal averaging (mainly used for wind turbines).
Missing docstring for thrusttorque(::Any, ::Any, ::Matrix{TO}) where TO. Check Documenter's build log for details.
Often we want to nondimensionalize the outputs. The nondimensionalization uses different conventions depending on the name assigned in rotortype.
Missing docstring for nondim. Check Documenter's build log for details.
For rotortype = "windturbine" the following outputs are returned:
\[\begin{aligned} C_P &= \frac{P}{q A V_{hub}}\\ C_T &= \frac{T}{q A}\\ C_Q &= \frac{Q}{q R_{disk} A}\\ \end{aligned}\]
where
\[\begin{aligned} R_{disk} &= R_{tip} \cos(\text{precone})\\ A &= \pi R_{disk}^2\\ q &= \frac{1}{2}\rho V_{hub}^2\\ \end{aligned}\]
For type = "propeller" the return outputs are:
\[\begin{aligned} \eta &= \frac{T V_{hub}}{P}\\ C_T &= \frac{T}{\rho n^2 D^4}\\ C_Q &= \frac{Q}{\rho n^2 D^5}\\ \end{aligned}\]
where
\[\begin{aligned} D &= 2 R_{disk}\\ n &= \frac{\Omega}{2\pi} \end{aligned}\]
For type = "helicopter" the return outputs are:
\[\begin{aligned} FM &= \frac{C_T^{3/2}}{\sqrt{2} C_P}\\ C_T &= \frac{T}{\rho A (\Omega R_{disk})^2}\\ C_P &= \frac{P}{\rho A (\Omega R_{disk})^3}\\ \end{aligned}\]
note that with this definition C_Q = C_P.
Airfoil Evaluation
The main airfoil evaluation function is afeval.
Missing docstring for afeval(::CCBlade.AFType, ::Any, ::Any, ::Any). Check Documenter's build log for details.
It dispatches based on subtypes of AFType or any Function of the form noted in the docstring. Several subtypes of AFType are implemented. The first is SimpleAF.
Missing docstring for SimpleAF. Check Documenter's build log for details.
This form is mostly useful for testing, or really simple analyse. Next, and perhaps the most common type is AlphaAF. This type takes in arrays of data and creates an Akima spline with variation just in angle of attack. It can also be initialized from a file (format discussed below).
Missing docstring for AlphaAF. Check Documenter's build log for details.
Similar forms exist for variation with angle of attack and Reynolds number:
Missing docstring for AlphaReAF. Check Documenter's build log for details.
angle of attack and Mach number:
Missing docstring for AlphaMachAF. Check Documenter's build log for details.
and all three (angle of attack, Reynolds number, Mach number):
Missing docstring for AlphaReMachAF. Check Documenter's build log for details.
More generally the user can provide any function of the form cl, cd = af(alpha, Re Mach) or can create their own subtypes of AFType to be used by CCBlade.
Airfoil Files
Because many of these formats require storing long vectors/matrices of data, it is convenient to store them in files. There are multiple convenience methods for reading and writing files based on the implemented AFType subtypes. The file format for all airfoil files is as follows:
______
informational line (arbitrary string just for information)
Re (float, Reynolds number data was taken at)
Mach (float, Mach number data was taken at)
alpha1 cl1 cd1 (columns of data separated by space for angle of attack, lift coefficient, and drag coefficient)
alpha2 cl2 cd2
alpha3 cl3 cd3
...
–––
In addition to reading these in directly, you can write data to a file, which is dispatched based on the AFType.
Missing docstring for write_af. Check Documenter's build log for details.
Airfoil (and Tip) Corrections
Various airfoil correction methods exist for Mach number, Reynolds number, and rotation effects. Additionally, custom tip loss corrections can be specified. For Mach number and Reynolds number the form is similar. For Mach number, there is the mach_correction function that dispatches based on subtypes of MachCorrection.
Missing docstring for mach_correction(::MachCorrection, ::Any, ::Any, ::Any). Check Documenter's build log for details.
For example, a Prandtl-Glauert correction is available:
Missing docstring for mach_correction(::PrandtlGlauert, ::Any, ::Any, ::Any). Check Documenter's build log for details.
Similarly, Reynolds number corrections use the re_correction function with dispatching based on subtypes of ReCorrection
Missing docstring for re_correction(::ReCorrection, ::Any, ::Any, ::Any). Check Documenter's build log for details.
A skin friction model based on flat plate increases in drag coefficient with Reynolds number is implemented:
Missing docstring for SkinFriction. Check Documenter's build log for details.
For convenience, there is also LaminarSkinFriction(Re0) and TurbulentSkinFriction(Re0) to set the exponent p for typical values for fully laminar and fully turbulent flow respectively.
Rotational corrections for 3D stall delay use the rotation_correction function that dispatches on subtypes of RotationCorrection.
Missing docstring for rotation_correction. Check Documenter's build log for details.
A supplied correction method uses the Du-Selig method for lift and the Eggers method for drag.
Missing docstring for DuSeligEggers. Check Documenter's build log for details.
Finally, tip loss corrections are provided by the tip_correction function dispatching based on TipCorrection.
Missing docstring for tip_correction. Check Documenter's build log for details.
Two provided corrections are Prandtl tip loss, and Prandtl tip and hub loss.
Missing docstring for PrandtlTip. Check Documenter's build log for details.
Missing docstring for PrandtlTipHub. Check Documenter's build log for details.
Airfoil Extrapolation
While not used in CCBlade directly, for convenience a preprocessing method is provided to extrapolate airfoil coefficient data from $-\pi$ to $\pi$.
Missing docstring for viterna. Check Documenter's build log for details.