3D Dubins Paths

This pakage provides 3D Dubins paths between two prescribed configuration. It provides smooth trajectories for fixed-wing aircraft while both curvature and pitch angle constraints are met.
Full description is provided in the following paper.
@INPROCEEDINGS{vana20minimal,
TITLE = {{Minimal 3D Dubins Path with Bounded Curvature and Pitch Angle}},
AUTHOR = {V{\'a}{\v{n}}a, Petr and Neto, Armando Alves and Faigl, Jan and Macharet, Douglas G},
BOOKTITLE = {2020 IEEE International Conference on Robotics and Automation (ICRA)},
PAGES = {8497--8503},
YEAR = {2020},
ORGANIZATION = {IEEE}
}
3D Dubins path example
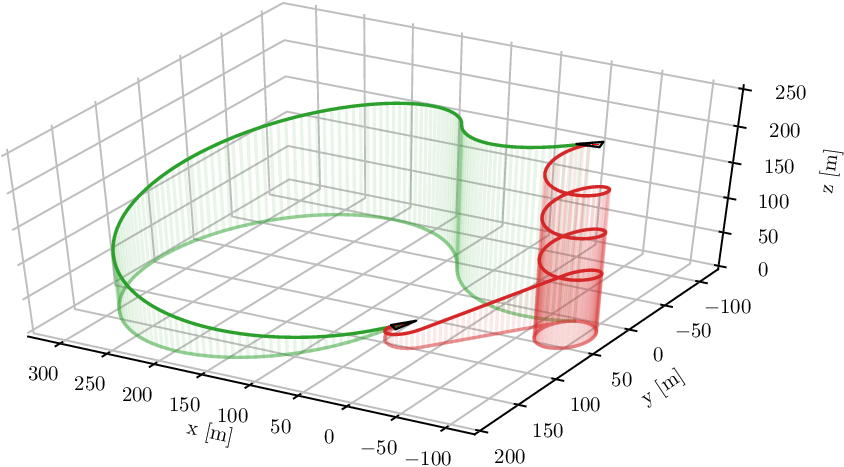 (Green represents the provided path, red is based on the minimum turing radius.)
(Green represents the provided path, red is based on the minimum turing radius.)
Installation
using Pkg
Pkg.add("Dubins3D.jl")
Basic usage
See example/basic.jl
using Dubins3D
# Convert degreees to radians
deg2rad(x) = pi * x / 180.
# Initial and final configurations [x, y, z, heading angle, pitch angle]
qi = [200., 500., 200., deg2rad(180.), deg2rad(-5.)]
qf = [500., 350., 100., deg2rad(0.), deg2rad(-5.)]
# Minimum turning radius
rhomin = 40.
# Pich angle constraints [min_pitch, max_pitch]
pitchlims = deg2rad.([-15., 20.])
maneuver = DubinsManeuver3D(qi, qf, rhomin, pitchlims)
# Length of the 3D Dubins path
@show maneuver.length
# Sample the manever by 500 samples
samples = compute_sampling(maneuver; numberOfSamples = 500)
# First and last samples - should be equal to qi and qf
@show samples[1]
@show samples[end]