Examples for using the four point kite model
Create a test project
mkdir test
cd test
julia --project="."With the last command we told julia to create a new project in the current directory.
Then we add the three required packages to our new project. By pressing the key "]" we enter the package manager mode where we can add or delete packages.
]
add KiteUtils
add KitePodModels
add KiteModels
st
<BACKSPACE>The command "st" was not really required, but it is useful to display which versions of the packages we have in our project. Another important package manager command is the command "up", which updates all packages to the latest compatible versions.
Then, copy the default configuration files and examples to your new project:
using KiteModels
copy_settings()
copy_examples()The first command copies the files settings.yaml and system.yaml to the folder data. They can be customized later. The second command creates an examples folder with some examples.
Plotting the initial state
First an instance of the model of the kite control unit (KCU) is created which is needed by the Kite Power System model KPS3. Then we create a kps instance, passing the kcu model as parameter. We need to declare these variables as const to achieve a decent performance.
using KiteModels
const kcu = KCU(se())
const kps = KPS4(kcu)Then we call the function findsteadystate which uses a non-linear solver to find the solution for a given elevation angle, reel-out speed and wind speed.
find_steady_state!(kps, prn=true)Finding the steady state of the 4 point model is difficult and it only works when we artificially reduce the stiffness by a factor of 0.035. In the function init_sim! this factor is slowly increased to 1.0.
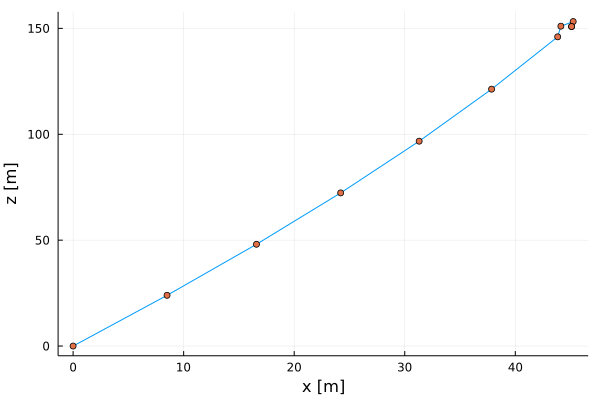
To plot the result in 2D we extract the vectors of the x and z coordinates of the tether particles with a for loop:
x = Float64[]
z = Float64[]
for i in 1:length(kps.pos)
push!(x, kps.pos[i][1])
push!(z, kps.pos[i][3])
endAnd finally we plot the postion of the particles in the x-z plane. When you type using Plots you will be ask if you want to install the Plots package. Just press \<ENTER\> and it gets installed.
using Plots
plot(x,z, xlabel="x [m]", ylabel="z [m]", legend=false)
plot!(x, z, seriestype = :scatter)Inital State
Print other model outputs
Print the vector of the positions of the particles:
julia> kps.pos
11-element StaticArrays.SVector{11, StaticArrays.MVector{3, Float64}} with indices SOneTo(11):
[0.0, 0.0, 0.0]
[27.956158502528176, 0.0, 61.20373231368065]
[54.19504320716677, 0.0, 123.16303233303098]
[78.43996882046399, 0.0, 185.92935677839677]
[100.5072692264489, 0.0, 249.49394853600091]
[120.24626566405448, 0.0, 313.81961163792636]
[137.52679164398376, 0.0, 378.84882574376326]
[138.4127462851352, 0.0, 383.77543513463166]
[139.02795801127078, 0.0, 386.0060385324739]
[138.8006044995987, 1.1208735809303805, 383.71585107239554]
[138.8006044995987, -1.1208735809303805, 383.71585107239554]
Print the unstretched and stretched tether length and the height of the kite:
julia> unstretched_length(kps)
392.0
julia> tether_length(kps)
403.71695082721294
julia> calc_height(kps)
386.0060385324739Because of the the stiffness_factor of 0.035 we have a longer tether-length then when using the 1 point kite model.
Print the force at the winch (groundstation, in Newton) and at each tether segment:
julia> winch_force(kps)
643.059283146209
julia> spring_forces(kps)
15-element Vector{Float64}:
643.0081086309667
642.9843324304267
642.9695864010523
642.9577694795955
642.9475947472262
642.938668170613
165.89618777926103
-25.722507476161205
51.67720019071219
254.61397516808276
244.5988483585308
244.5988483585308
254.61397516808276
-25.722507476161205
166.98431814092817Some of the forces are negative which means the segments are getting compressed. This is acceptable for the kite itself (not for the tether).
Print the lift and drag forces of the kite (in Newton) and the lift over drag ratio:
julia> lift, drag = lift_drag(kps)
(616.7473148222452, 142.89285185868704)
julia> lift_over_drag(kps)
4.316152325325367Print the wind speed vector at the kite:
julia> v_wind_kite(kps)
3-element StaticArrays.MVector{3, Float64} with indices SOneTo(3):
13.310738776362681
0.0
0.0