FAQ
My simulation is really slow and/or using a lot of memory, what can I do?
To reduce memory use, use save_positions=(false,false) in the JumpProblem constructor as described earlier to turn off saving the system state before and after every jump. Combined with use of saveat in the call to solve this can dramatically reduce memory usage.
While Direct is often fastest for systems with 10 or less ConstantRateJumps or MassActionJumps, if your system has many jumps or one jump occurs most frequently, other stochastic simulation algorithms may be faster. See Constant Rate Jump Aggregators and the subsequent sections there for guidance on choosing different SSAs (called aggregators in DiffEqJump).
When running many consecutive simulations, for example within an EnsembleProblem or loop, how can I update JumpProblems?
In Remaking JumpProblems we show how to modify parameters, the initial condition, and other components of a generated JumpProblem. This can be useful when trying to call solve many times while avoiding reallocations of the internal aggregators for each new parameter value or initial condition.
How can I define collections of many different jumps and pass them to JumpProblem?
We can use JumpSets to collect jumps together, and then pass them into JumpProblems directly. For example, using the MassActionJump and ConstantRateJump defined earlier we can write
jset = JumpSet(mass_act_jump, birth_jump)
jump_prob = JumpProblem(prob, Direct(), jset)
sol = solve(jump_prob, SSAStepper())If you have many jumps in tuples or vectors it is easiest to use the keyword argument-based constructor:
cj1 = ConstantRateJump(rate1, affect1!)
cj2 = ConstantRateJump(rate2, affect2!)
cjvec = [cj1, cj2]
vj1 = VariableRateJump(rate3, affect3!)
vj2 = VariableRateJump(rate4, affect4!)
vjtuple = (vj1, vj2)
jset = JumpSet(; constant_jumps=cjvec, variable_jumps=vjtuple,
massaction_jumps=mass_act_jump)How can I set the random number generator used in the jump process sampling algorithms (SSAs)?
Random number generators can be passed to JumpProblem via the rng keyword argument. Continuing the previous example:
#] add RandomNumbers
using RandomNumbers
jprob = JumpProblem(dprob, Direct(), maj,
rng = Xorshifts.Xoroshiro128Star(rand(UInt64)))uses the Xoroshiro128Star generator from RandomNumbers.jl.
On version 1.7 and up DiffEqJump uses Julia's builtin random number generator by default. On versions below 1.7 it uses Xoroshiro128Star.
What are these aggregators and aggregations in DiffEqJump?
DiffEqJump provides a variety of methods for sampling the time the next ConstantRateJump or MassActionJump occurs, and which jump type happens at that time. These methods are examples of stochastic simulation algorithms (SSAs), also known as Gillespie methods, Doob's method, or Kinetic Monte Carlo methods. In the DiffEqJump terminology we call such methods "aggregators", and the cache structures that hold their basic data "aggregations". See Constant Rate Jump Aggregators for a list of the available SSA aggregators.
How should jumps be ordered in dependency graphs?
Internally, DiffEqJump SSAs (aggregators) order all MassActionJumps first, then all ConstantRateJumps. i.e. in the example
using DiffEqJump
rs = [[1 => 1], [2 => 1]]
ns = [[1 => -1, 2 => 1], [1 => 1, 2 => -1]]
p = [1.0, 0.0]
maj = MassActionJump(rs, ns; param_idxs=[1, 2])
rate1(u, p, t) = u[1]
function affect1!(integrator)
u[1] -= 1
end
cj1 = ConstantRateJump(rate1, affect1)
rate2(u, p, t) = u[2]
function affect2!(integrator)
u[2] -= 1
end
cj2 = ConstantRateJump(rate2, affect2)
jset = JumpSet(; constant_jumps=[cj1, cj2], massaction_jump=maj)The four jumps would be ordered by the first jump in maj, the second jump in maj, cj1, and finally cj2. Any user-generated dependency graphs should then follow this ordering when assigning an integer id to each jump.
See also Constant Rate Jump Aggregators Requiring Dependency Graphs for more on dependency graphs needed for the various SSAs.
How do I use callbacks with ConstantRateJump or MassActionJump systems?
Callbacks can be used with ConstantRateJumps and MassActionJumps. When solving a pure jump system with SSAStepper, only discrete callbacks can be used (otherwise a different time stepper is needed). When using an ODE or SDE time stepper any callback should work.
Note, when modifying u or p within a callback, you must call reset_aggregated_jumps! after making updates. This ensures that the underlying jump simulation algorithms know to reinitialize their internal data structures. Leaving out this call will lead to incorrect behavior!
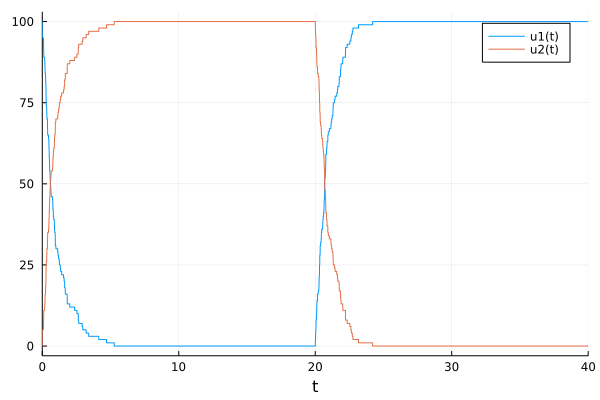
A simple example that uses a MassActionJump and changes the parameters at a specified time in the simulation using a DiscreteCallback is
using DiffEqJump
rs = [[1 => 1], [2 => 1]]
ns = [[1 => -1, 2 => 1], [1 => 1, 2 => -1]]
p = [1.0, 0.0]
maj = MassActionJump(rs, ns; param_idxs=[1, 2])
u₀ = [100, 0]
tspan = (0.0, 40.0)
dprob = DiscreteProblem(u₀, tspan, p)
jprob = JumpProblem(dprob, Direct(), maj)
pcondit(u, t, integrator) = t == 20.0
function paffect!(integrator)
integrator.p[1] = 0.0
integrator.p[2] = 1.0
reset_aggregated_jumps!(integrator)
nothing
end
sol = solve(jprob, SSAStepper(), tstops=[20.0], callback=DiscreteCallback(pcondit, paffect!))Here at time 20.0 we turn off production of u[2] while activating production of u[1], giving
How can I access earlier solution values in callbacks?
When using an ODE or SDE time-stepper that conforms to the integrator interface one can simply use integrator.uprev. For efficiency reasons, the pure jump SSAStepper integrator does not have such a field. If one needs solution components at earlier times one can save them within the callback condition by making a functor:
# stores the previous value of u[2] and represents the callback functions
mutable struct UprevCondition{T}
u2::T
end
# condition
function (upc::UprevCondition)(u, t, integrator)
# condition for the callback is that the new value of u[2]
# is smaller than the previous value
condit = u[2] - upc.u2 < 0
# save the new value as the previous value
upc.u2 = u[2]
condit
end
# affect!
function (upc::UprevCondition)(integrator)
integrator.u[4] -= 1
nothing
end
upc = UprevCondition(u0[2])
cb = DiscreteCallback(upc, upc)