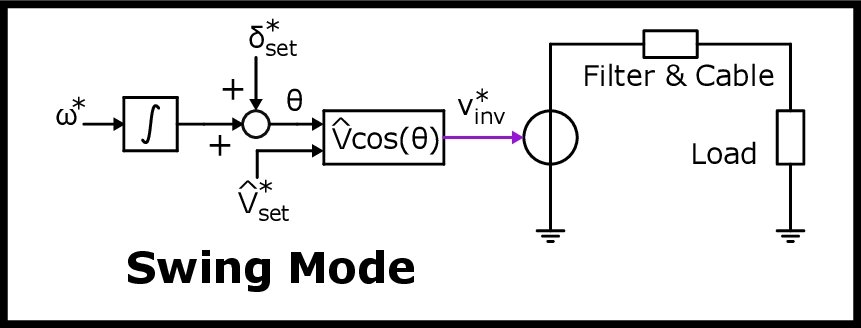
Swing Mode - Infinite Bus
| Mode | Description | |
|---|---|---|
| 1 | "Swing" | Ideal voltage source without dynamics (i.e., an infinite bus) |
| 2 | "PQ" | Grid following controllable source/load (real and imaginary power) |
| 3 | "Droop" | Simple grid forming with power balancing through a droop mechanism |
| 4 | "Synchronverter" or "VSG" | Grid forming control mimicking a generator, i.e., virtual synchronous generator |
- There are a number of in-built "classically" control modes, which can be applied to the energy sources.
- All sources of energy are modelled as voltage supplies, which are effective models (or averaged models) of power electronic converters.
Summary
- This notebook is intended to introduce you to the simplest control mode available, i.e., "open-loop" control.
- One source, an ideal oscillating voltage source, which is generating a 3-phase AC signal while connected to a static load through a cable.
- Plotting of the simulation results.
using ElectricGrid;_______________________________________________________________________________
Network Configuration
- We specify the control mode of the source as "Swing", often referred to as an infinite bus.
- This is open-loop control of the source, where the output voltage magnitude, relative angle, and frequency at the source terminals are fixed.
# total run time, seconds
t_end = 0.1
# Connectivity Matrix
CM = [ 0. 1.
-1. 0.]
parameters = Dict{Any, Any}(
"source" => Any[
Dict{Any, Any}("pwr" => 100e3, # Power Rating [VAr]
"mode" => "Swing", # Controller mode
"v_pu_set" => 1.05, # Voltage set point [per unit]
"v_δ_set" => 20.0), # Angle set point [degrees]
],
"load" => Any[
Dict{Any, Any}("impedance" => "RL",
"R" => 3.73,
"L" => 0.019),
],
"cable" => Any[
Dict{Any, Any}("R" => 0.1,
"L" => 0.25e-3,
"C" => 0.1e-4),
],
"grid" => Dict{Any, Any}("f_grid" => 60.0, # Nominal grid frequency [Hz]
"ramp_end" => 0.04, # Ramp up time to voltage set point [s]
"v_rms" => 230) # Nominal grid voltage line-to-neutral [V]
);_______________________________________________________________________________
Defining the environment
To put all of the parameters together and construct the Linear Time Invariant (LTI) system of equations we run the following command.
env = ElectricGridEnv(CM = CM, parameters = parameters, t_end = t_end, verbosity = 2);┌ Info: Normalization is done based on the defined parameter limits.
└ @ JEG c:\Gitlab\JEG\ElectricGrid.jl\src\electric_grid_env.jl:329
┌ Info: Time simulation run time: 0.1 [s] ~> 1001 steps
└ @ JEG c:\Gitlab\JEG\ElectricGrid.jl\src\electric_grid_env.jl:330_______________________________________________________________________________
Initialising the Controller
- All sources are controlled within the reinforcement learning framework, even if the control mode selected for the source does not entail any "learning" or "training" of the control structure.
- If not specified by the user, for all the classically controlled "agents", the function SetupAgents computes all the necessary coefficients for control.
agent = SetupAgents(env);┌ Info: 1 'classically' controlled source has been initialised.
└ @ JEG c:\Gitlab\JEG\ElectricGrid.jl\src\classical_control.jl:2684
┌ Info: 1 source has been set up in Swing mode.
└ @ JEG c:\Gitlab\JEG\ElectricGrid.jl\src\classical_control.jl:2695
┌ Info: All 'classically' controlled sources have been automatically set up with droop coeficients, and proportional and integral gains.
└ @ JEG c:\Gitlab\JEG\ElectricGrid.jl\src\classical_control.jl:2707_______________________________________________________________________________
Running the Time Domain Simulation
- The system is evolved for the specified amount of time, controller actions are computed, and the results are stored in a "hook".
- Most relevant quantities are automatically collected, however, by passing a DataHook to the "simulate" function, signals may be specified.
hook = Simulate(agent, env);_______________________________________________________________________________
Low-Level Rendering
- The software solves the electrical network in the time domain using a set of linear time-invariant ODEs.
- For illustration reasons, the source voltage (action) and current through the filter inductor (state) of phase 'a' are shown below.
RenderHookResults(hook = hook,
states_to_plot = ["source1_i_L1_a"], # Inductor current [A]
actions_to_plot = ["source1_u_a"], # Inverter voltage [V]
)_______________________________________________________________________________
High-Level Rendering
- When sources are classically controlled and the network is a 3 phase system, the user has the option of plotting a number of additional quantities.
- The only quantities that can be plotted for reinforcement learning controllers are those specified through "statestoplot" and "actionstoplot".
- The elements of the vectors in the function "RenderHookResults" refer to the name of the classically controlled source which may differ if there are RL sources in the network, e.g., powerpinv = [1], indicates that the real power of the first classically controlled source should be plotted.
RenderHookResults(hook = hook,
states_to_plot = [],
actions_to_plot = [],
power_p_inv = [1], # Real power [Watts]
power_q_inv = [1], # Imaginary power [VAi]
v_mag_inv = [1], # Scaled L₂ norm in αβγ coordinates [V]
i_mag_inv = [1], # Scaled L₂ norm in αβγ coordinates [A]
angles = [1], # Relative angle [degrees]
freq = [1], # Angular velocity [Hz]
)_______________________________________________________________________________
Analysis
- The plot shows the instantaneous 3-phase real [W] and imaginary [VAi] power delivered by the source.
- The frequency is a constant 60 Hz.
- The relative positive phase sequence angle at the terminals of the source is 20 degrees.
- The voltage at the source terminals ramps up to a magnitude of 1.05*230 V over a period of 0.04 s.