Modeling Viscoelasticity of the Earth
In a previous section, we consider the viscoelasticity constitutive relation. In this section, we consider an application case: the viscoelasticity of the Earth. We show the viscoelasticity effect related with postseismic relaxation under two settings: strike-slip fault and dip-slip fault. The background of these problems can be found in Chapter 6 of Segall, P. (2010)'s book "Earthquake and volcano deformation".
In geology, a fault is a planar fracture or discontinuity in a volume of rock across which there has been significant displacement as a result of rock-mass movement. There are many types of faults based on the direction of slip. In this section, we focus on two types of slip: strike-slip, where the offset is predominantly horizontal, and dip-slip, where offset is predominately vertical.

We use a viscoelasticity model to describe the fault evolution. The mathematical equations are discretized on an unstructure quadrilateral mesh using the finite element method. In another section, we estimate the viscoelasticity parameter from surface displacement data using a gradient-based optimization (L-BFGS-B) technique. We utilize the AD-capable ViscoelasticitySolver in NNFEM for forward computational and automatic differentiation.
Strike-slip Fault Setting
In this case, the displacement only occurs in the $z$ direction, so we can use a scalar valued function $u(x,y)$ to denote the displacement.

The constitutive relation is described by the Maxwell viscoelasticity model
Here
To complete the equation, we also have the balance of linear momentum (kinematic equation)
where $f$ is the body force and $\rho$ is the density.
In the case $\eta$ is very small, the constitutive relation can be approximated by
By plugging the equations into Equation 1 (ignoring the body force), and integrate in time
Equation 1 is a diffusion equation.
In the case $\eta$ is very large, the constitutive relation is reduced to linear elasticity
Therefore, the kinematic equation is reduced to a wave equation
We discretize the constitutive relation using an implicit scheme
which is equivalent to
Numerical result
| displacement $u$ | velocity $\dot u$ | strain rate $\partial \dot u / \partial x$ |
|---|---|---|
 |  |  |
Dip-slip Fault Setting
The constitutive relation of a dip-slip fault can be described by a plane strain viscoelasticity model
| Finite element model | Elastic response |
|---|---|
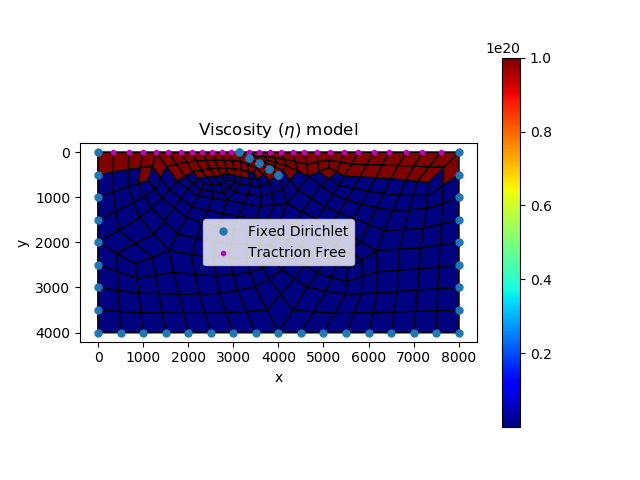 |  |
Numerical result
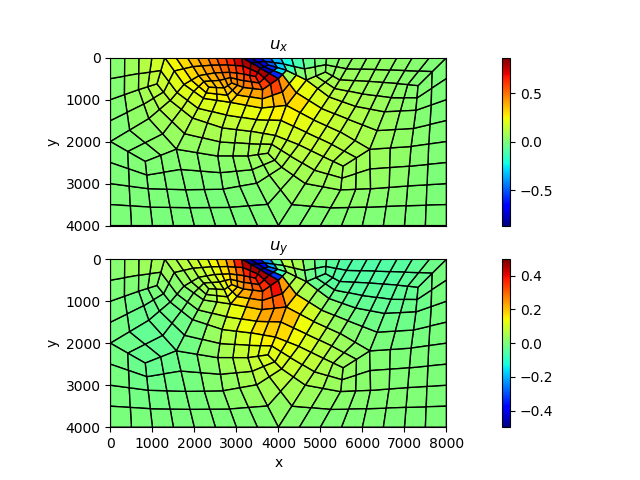
| horizontal slip $u_x$ | vertical slip $u_y$ | von Mises stress |
|---|---|---|
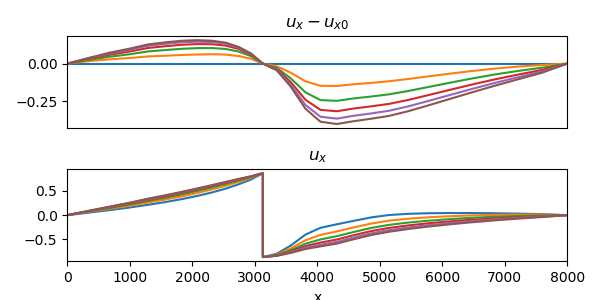 | 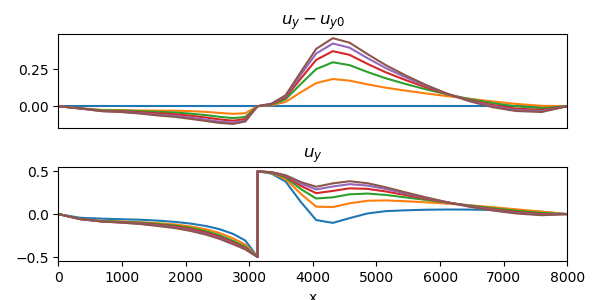 | 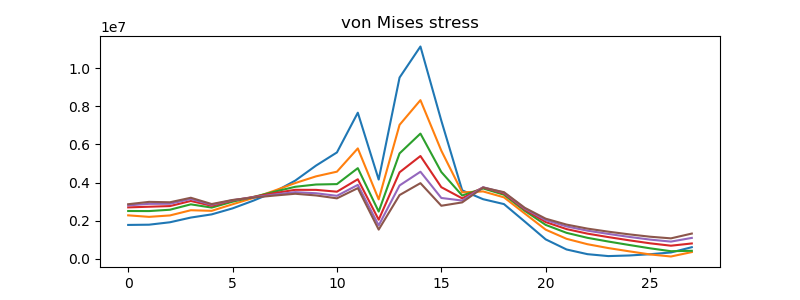 |

Example code: dippingfaultviscosityforward.jl.